Matematika parnog stroja
Tvrtko Tadić
Sadržaj:
1. Uvod
2. Parni stroj
3. Wattov jednostavni linearizirajući mehanizam
4. Wattov drugi parni stroj
5. Još jedan pokušaj
6. Rješenje problema
7. Zaključak
8. GSP file
9. Literatura
1. Uvod
U ovom ćemo se članku upoznati s jednim od važnih problema prve
industrijske revolucije. Pitanje je kako parni stroj učiniti
učinkovitim. Ovdje ćemo se pozabaviti temom članka [2], u
kojem su izneseni ti problemi. U cijeloj priči koristit ćemo
računalni program The Geometer's Sketchpad. Cilj nam je razmotriti te probleme i pomoću
software-a pokazati da su rezultati koje su dobili njihovi
otkrivači ispravni. Na kraju će se problem svesti na
pitanje pretvaranja kružnog gibanja u linearno i obrnuto.
2. Parni stroj
1780-ih James Watt usavršio je parni stroj, ostalo je povijest.
Međutim, kod parnog stroja bilo je mnogih problema s kojima se
njegov izumitelj domišljato borio. Prvi parni stroj bio je oblika
prikazanog na slici 1.
 |
| Slika 1: Wattov prvi stroj
|
Točka A giba se po pravcu gore-dolje, a točka B giba se po
kružnici i time pokreće kolo. Ovo rješenje nije bilo dovoljno
uspješno, stroj se brzo raspadao, a dodatci koje je Watt htio dodati
kako bi stroj jače radio nisu se više mogli staviti na ovakvu
konstrukciju.
3. Wattov jednostavni linearizirajući mehanizam
Stoga je Watt počeo razmišljati mora li točka A nužno ići po
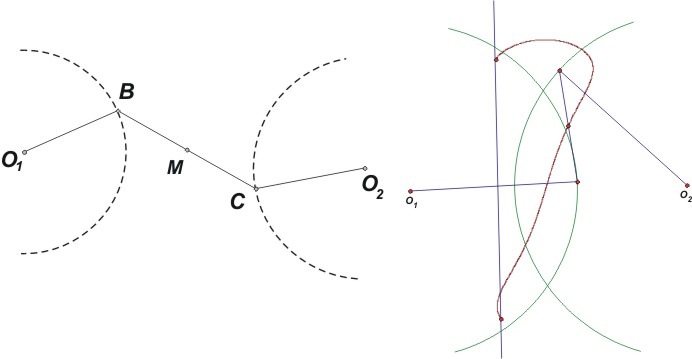
pravcu. Watt se tada dosjetio sljedeće ideje (vidi sliku 2.). Neka
su točke O1 i O2 nepomične. Neka se točke B i C miču oko
O1 i O2 na jednakim udaljenostima od njih i neka je |BC|
isto nepromjenjive vrijednosti. Watt je tada pretpostavio da će točka M, koja je
polovište dužine BC, ležati na pravcu.
 |
| Slika 2: Leži li točka M na pravcu?
|
Sad se postavlja pitanje: koje je geometrijsko mjesto točaka M?
Kao iskusni inženjer geometrijski je konstruirao (skicirao) svoju ideju. Watt je otkrio da dobivena krivulja nije pravac, no također je bio svjestan
da trajektorija točke M ne odstupa daleko od pravca. Kako bismo
lakše vizualizirali gdje točka M zaista leži, pozvat ćemo u pomoć
program GSP. On nam omogućuje da pomoću naredbi
trace point i locus odredimo geometrijsko mjesto
točaka M.
 |
| Slika 3: Kretanje točke M
|
Kao rezultat dobivamo sliku 3. Krivulja na slici 3 je krivulja
šestog stupnja! No Watt je bio svjestan da krivulja djelomično
odstupa od pravca. Na nekim dijelovima čak i previše za praktične
potrebe. Postavilo se pitanje mora li M biti polovište ili može
biti neka druga točka dužine. Ponovo ćemo koristiti
GSP kako bismo to odgonetnuli.
 |
| Slika 4: Trajektorija i Wattova konstrukcija
|
Što bi bilo kad bi točka M dijelila dužinu BC u
omjeru 2:1, 1:2, 3:4,... ?
Općenito,
kako se dobivena krivulja (locus) mijenja kad mijenjamo točku M?
Watt (kao iskusni inženjer) je vlastitim približnim konstrukcijama (njemu dostupnim alatom) uspio pokazati da će neki
dijelovi krivulje jako malo odstupati od pravca koji je on zamislio.
Promjenom omjera krivulja se mogla bolje ,,priljubiti'' uz pravac
(vidi sliku 4.). Watt na taj način nije dobio pravac, ali je smanjio odstupanje trajektorije od pravca.
4. Wattov drugi parni stroj
Taj njegov pronalazak omogućio mu je da svoj stroj spoji čvršće i
da mu se ne raspada. Tako je nastao Wattov drugi stroj koji je bio
dovoljno stabilan za praktične potrebe. Sam Watt smatrao je ovo
otkriće (približne krivulje) svojim najvećim znanstvenim
postignućem. Pogledajmo sada kako je njegov stroj radio.
 |
| Slika 5: Wattov drugi parni stroj
|
Točke O1 i
O2 fiksne su i spojene karikama za točke B
i C. Na dužini BC nalazi se točka M koja se kreće
po dijelu prethodno opisane krivulje koji najmanje odstupa od pravca.
Kako stroj ima dva dijela koja ga pokreću, pumpu za vodu i parni
kotao, ta dva dijela moraju se istovremeno kretati tako da se stroj ne raspadne. Taj problem
riješen je tzv. Wattovim paralelogramom BCB'C', a točka
M odabrana je tako da točke M i M', koje pokreću
mehanizam, i točka O2 leže na istom pravcu. Iz sličnosti trokuta C'M'O2 i CMO2
slijedi da je omjer |M'O2| : |MO2| = |C'O2| : |CO2| stalan.
Trajektorije točaka M i M' međusobno su homotetične sa središtem O2
i koeficijentom |C'O2| / |CO2|. Ovime je
konačno parni stroj bio spreman za upotrebu.
5. Još jedan pokušaj
Pokušaj da se riješi pitanje pretvaranja
linearnog u kružno gibanje još će dugo mučiti znanstvenike. Ruski
matematičar (i mehaničar) Čebišev
istražujući funkcije koje imaju minimalnu devijaciju od nule ponudit će svoj mehanizam. Ovaj mehanizam će
isto tako biti približno rješenje problema. Ovdje ćemo demonstrirati kako
izgleda mehanizam - više o njemu možete vidjeti u članku [3].
 |
| Slika 6: Model Čebiševljevog linearizirajućeg mehanizma
|
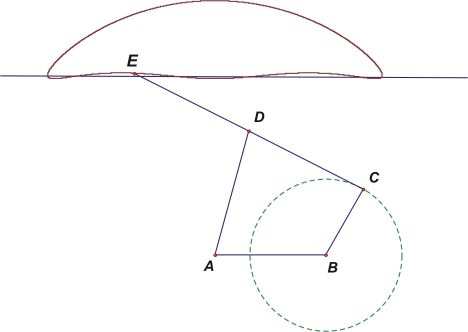
Mehanizam je oblika kao na slici 6. Između njegovih karika
vrijede sljedeće relacije:
|ED| = |DC| = |AD| = a, |BC| = b,
3|AB| = |DC| + |AD| + |BC|.
Kao rezultat kretanja točke C
po kružnici polumjera b sa središtem u
B dobivamo trajektoriju koja je prikazana na slici.
Donji dio te
trajektorije ima jako mala odstupanja od pravca koji je paralelan
s AB. Za vrijednosti a = 1.2 m i b = 0.4 m najveće odstupanje od
pravca iznosilo bi 0.0004 m. Stvarno malo! Prednost GSP-a
je to što se cijeli mehanizam može konstruirati i oživjeti, a
mjere se mogu i provjeriti. (Za više vidi [3].)
6. Rješenje problema
Nakon mnogih pokušaja, problem pretvaranja kružnog gibanja u
linearno riješen je tek 1867. Skoro stoljeće kasnije! S obzirom da
je riječ o problemu koji pravac mora preslikati u kružnicu i
obrnuto, rješenje uključuje inverziju. Dok su nam prethodna
rješenja nudila tek aproksiomacije pretvaranja linearnog
u kružno gibanje (i obrnuto) ovo je prvo strogo (matematički
gledano) rješenje tog problema.
Rješenje je ponudio francuski inženjer
Charles-Nicolas Peaucellier
(1832.-1912.). Do istog otkrića došao je ruski matematičar
Lippman Lipkin (živio u Rusiji i Latviji), nazavisno i nešto kasnije od Peaucelliera.
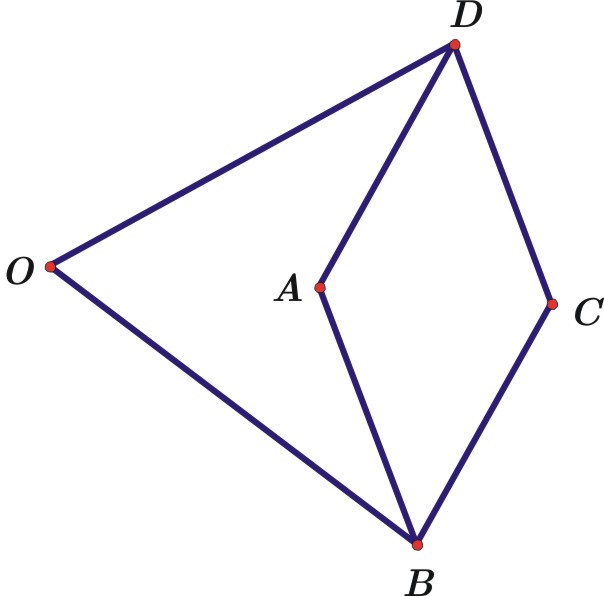 |
| Slika 7: Peaucellierov inverzor
|
Mehanizam na slici 7. ima sljedeće osobine: četverokut ABCD je
romb, a karike OD i OB jednakih
su duljina i vrijedi |OD| = |OB|. Kad se točka A kreće po pravcu,
točka B kreće se po kružnici sa središtem u O. Kad se točka
A kreće po kružnici sa središtem u O, točka B kreće se po
pravcu. Dakle, naš mehanizam provodi inverziju. Ovo se lako pokaže
u GSP-u. (Vidi sliku 8.)
 |
| Slika 8: Pojava inverzije
|
7. Zaključak
Kako vidimo, program The Geometer's Sketchpad može biti jako
koristan u izradi modela gibanja i raznih mehanizama. Ono za što
je otkrivačima (,,pionirima znanosti'') trebalo mnogo
mukotrpnog posla i papira, mi uz malu pomoć nove tehnologije
možemo brzo i lako napraviti i provjeriti njihove rezultate, a oni su se
morali bojati da negdje nisu pogriješili u računu.
8. GSP file
Ovaj članak je dorađena verzija članka [4]. Ovdje je objavljen kako bi čitatelji mogli vidjeti animirane verzije slika i uzeti GSP
file u kojima su one rađene.
Ovdje možete preuzeti GSP file u kojem su izrađene slike.
9. Literatura
[1] Malkevitch J., Linkages: From
Fingers to Robot Arms, What's New in Mathematics Feature Column
Archive, AMS, 2002.
[2] Solovyov Y., Making the crooked straight, Quantum the student magazine of
math and science, vol 1. nr. 2, NSTA,
Washington, 1990.
[3] Tadić T., Model Čebiševljevog linearizirajućeg
mehanizma, PlayMath
časopis V. gimnazije za matematiku i informatiku, broj 4, Zagreb, 2004.
[4] Tadić T., Matematika parnog stroja, Poučak časopis za metodiku i nastavu
matematike, broj 18-19, HMD i
Profil International, Zagreb, 2004.
[5] Home Page for Virtual Mechanisms,
Brock Institute for Advanced Studies, Roxbury
1. Uvod
2. Parni stroj
3. Wattov jednostavni linearizirajući mehanizam
4. Wattov drugi parni stroj
5. Još jedan pokušaj
6. Rješenje problema
7. Zaključak
8. GSP file
9. Literatura
